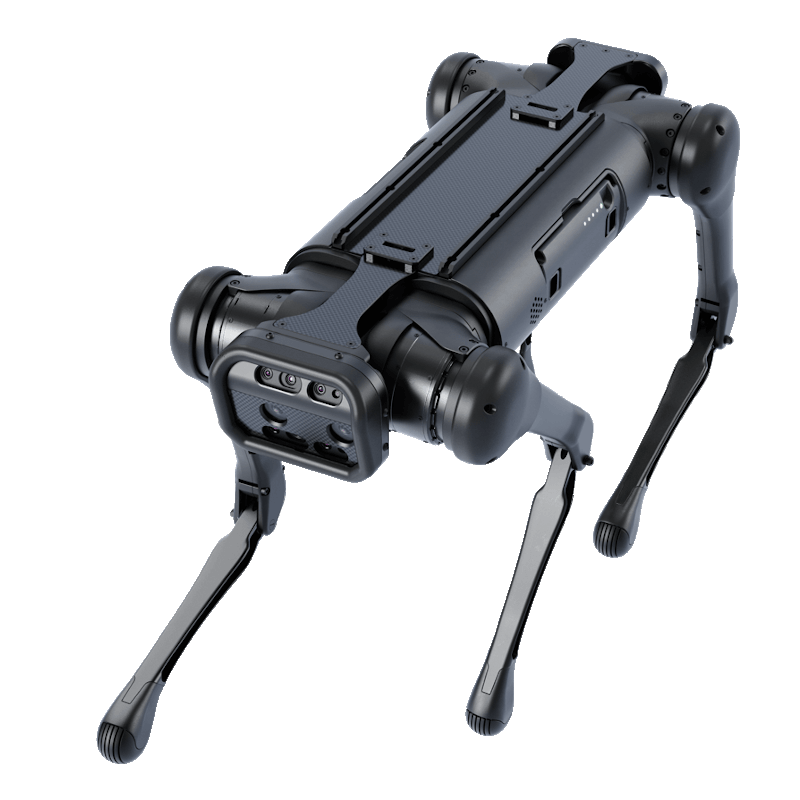
Unitree AlienGo




Unitree AlienGo
More Dexterity, More Possibilities
|
|
Excellent Sportiness
12 High-performance Servo Motors
It can easily realize special sports forms such as fast running, backward running, left and right side shifting, turning in place, creeping forward, rolling over, jumping, crossing obstacles, avoiding obstacles, climbing in place after falling to the ground, going up and down slopes/steps.
The maximum walking speed exceeds 1.5M/S.
The fuselage has a good ability to resist impact, and the fuselage can resist the impact load well when running, jumping, colliding with foreign objects and falling.
Good Stability
Even if there is external interference, the attitude can be quickly adjusted to achieve a stable operating state.
Force Control Technology of Joint Compound Control
It can realize the full control of 3-axis attitude and position, so it has strong multi-terrain adaptability and can operate stably on rugged gravel roads and grassland roads.
Good Openness
The software control interface is divided into high-level interface and the underlying interface control interface supports C/C++, ROS, etc.
Allows reading of all types of sensor data.
Allows control of a single motor or a single leg movement.
Rich External Interfaces
The developer version comes with an onboard PC and opens the corresponding interfaces. Users are allowed to carry their own modules (such as vision cameras, lidar, robotic arms, GPS systems, etc.) for interactive control. External interfaces include: HDMIx2, Ethernet port x2, USB 3.0x2, USB 2.0x1, 485 port x1.
Multi-view Deep Sensing Vision
Depth Camera x2sets
- Global Shutter and Wide Field of View Minimum Sensing depth of 0.11 meters Up to 1280x720 Depth Resolution
Visual Odometer Camera x1set
- Highly optimized V-SLAM with a closed-loop offset of less than 1% and a delay of less than 6 milliseconds between attitude action and action reflection. The fisheye lens imager, combined with a near-hemispherical 163-# field angle, enables stable tracking with fast movement.
New Technology, Professional-Grade Quadruped Robot
|
Weight (without battery) |
Encoder of Each Joint |
|
Length*Width*Height (stand) |
Joint Cables are Fully Built-in |
|
Lengtht*Width*Height (fold) |
Physical Protection of Joint Torque |
|
Load |
Reducer Wear Protection |
|
Maximum Walking Speed |
HD Real-time Image Transmission |
|
Climbing Angle |
External Interfaces |
|
Enduranc |
Real-time Operation System |
|
Battery Capacity |
Sensing Function |
|
Degreeof Freedom of the whole mashine (number of motors) |
Sports Function |
|
Number of foot force sensors |
This parameter will be modified appropriately according to product improvements, upgrades and other reasons, without additional notice, and the actual product shall prevail in the end. |
|
Protection Mode |
|
|
Alarm System |
|
|
Body Output Power |
 A1 Motor
A1 Motor A1 Battery
A1 Battery




")
")
")
{kind=link}
{kind=link}
{kind=link}